
زیمنس کنترل
کد : 44617


وقتی از DCS برای پردازش دیجیتال و کاربرد هایی نظیر اینترلاکینگ استفاده می شود ، مشکل اصلی سرعت واکنش سیستم نسبت به تغییرات سیگنال ها است. به طور کلی واکنش DCS نسبت به PLC کندتر است و علت آن بار زیاد پردازش آن است. در DCS برای به دست آوردن امکانات اپراتوری و مهندسی از زبان ها و روش های سطح بالا نظیر CFC در منطق برنامه نویسی استفاده می شود. این زبان ها پس از کامپایل کد های زیادی را برای کنترلر تولید می کنند که این امر منجر به کند شدن سرعت عمل سیستم نسبت به تغییرات ورودی ها می گردد. در حالی که در PLC زبان هایی مانند FBD و LAD و STL کد های زیادی تولید نمی کنند و به ویژه STL زبان سطح پایین و نزدیک به ماشین است. شکل زیر نحوه ی برنامه نویسی یک لاجیک ساده را در PLC نمایندگی زیمنس و DCS نشان می دهد.
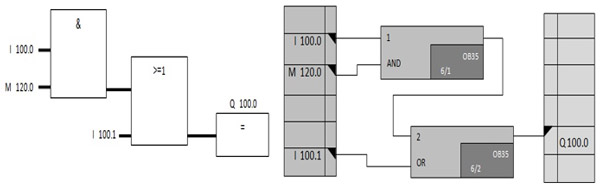
لاجیک فوق پس از تبدیل به زبان ماشین CFC حدود 10 برابر FBD خواهد بود. به همین علت است که در سیستم هایی که نیاز به سرعت عمل بالا وجود دارد ، مانند سیستم های قطع اضطراری از PLC به جای DCS استفاده می کنند.
DCS اگرچه می تواند سیگنال های ON/OFF را نیز مانند PLC پردازش کند ، ولی به دلیل این که دائماً درگیر پردازش های زیاد کنترل لوپ است نمی تواند به سرعت به سیگنال های مهم مانند PLC واکنش نشان دهد.